Interpolação Polinomial
Método da interpolação polinomial
A interpolação polinomial visa permitir interpolar dados próximos a valores tabelados, modelando um conjunto de pontos em uma função, cujo grau varia de acordo com a quantidade de pontos considerados para o método.
Método de Lagrange
O método de Lagrange aparece como a soma de funções polinomiais calculadas para cada ponto experimental. Na forma de:
\[P(x)=f(x)\_0\cdot{}L(x)\_0+f(x)\_1\cdot{}L(x)\_1+...+f(x)\_n\cdot{}L(x)\_n\] \[L\_{i}(x)=\frac{(x-x_0)(x-x_1)...(x-x_n)}{(x_i-x_0)(x_i-x_1)...(x_i-x_n)}\]Exemplo
Dado o conjunto de pontos:
| x | f(x) |
|---|---|
| -1 | 4 |
| 0 | 1 |
| 2 | -1 |
Pode-se utilizar o método de interpolação polinomial de Lagrange para determinar uma função que os aproxime razoavelmente bem:
- \(P(x)=f(x)_0\cdot{}L(x)_0+f(x)_1\cdot{}L(x)_1f(x)_n\cdot{}L(x)_n\)
- \(L_{i}(x)=\frac{(x-x_0)(x-x_1)...(x-x_n)}{(x_i-x_0)(x_i-x_1)...(x_i-x_n)}\)
Para, respectivamente, os pontos: 1, 2 e 3; temos as funções L:
- \(L_0=\frac{(x-x_1)(x-x_2)}{(x_0-x_1)(x_0-x_2)}=\frac{(x-0)(x-2)}{(-1-0)(-1-2)}=\frac{x^2-2x}{3}\)
- \(L_1=\frac{(x-x_0)(x-x_2)}{(x_1-x_0)(x_1-x_2)}=\frac{(x+1)(x-2)}{(1)(-2)}=-\frac{x^2-x-2}{2}\)
- \(L_2=\frac{(x-x_0)(x-x_1)}{(x_2-x_0)(x_2-x_1)}=\frac{(x+1)(x)}{(2+1)(2)}=\frac{x^2+x}{6}\)
Plugando esses valores na função de P(x), temos:
\[P(x)=4\frac{x^2-2x}{3}+1\frac{x^2-x-2}{-2}-1\frac{x^2+x}{6}\]Que, simplificando, aparece na forma:
\[P(x)=\frac{2}{3}x^2-\frac{7}{3}x+1\]Método de Newton
A princípio, uma referência valiosa para o estudo desse método pode ser encontrada no vídeo incorporado a seguir:
Dito isso, o ponto principal desse método é permitir a interpolação através do cálculo de coeficientes através da variação entre os pontos experimentais.
Para isso, os pontos devem ser dispostos em um diagrama do tipo:
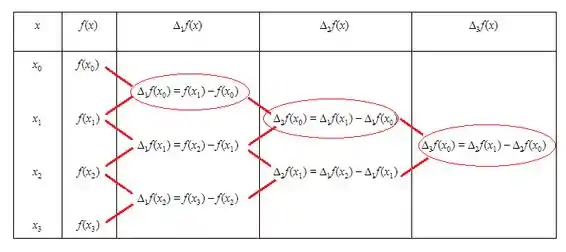 Montagem do sistema para método de Newton
Montagem do sistema para método de Newton
De forma que a variação entre os pontos deve ser calculada pela diferença. Feito isso, basta montar a equação seguindo a fórmula:
\[f(x)=a_0+a_1(x-x_0)+a_2(x-x_0)(x-x_1)\]E obtêm-se o polinômio interpolador de Newton.
Erro associado
Pode-se calcular o erro máximo de uma função, por exemplo, no segundo grau, a partir da expressão:
\[Err(x)=\frac{(x-x_0)(x-x_1)(x-x_2)}{3!}\cdot{}\max{}f^{(3)}(\epsilon)\]Tal que \(\max{}f^{(3)}\) é o valor máximo da terceira derivada – da função original – no ponto \(x\) onde deseja-se determinar o limite de erro máximo.